Notation list
l¨CThe length of the Basic Grid;
w¨CThe width of Basic Grid;
h¨CThe height of the Basic Grid;
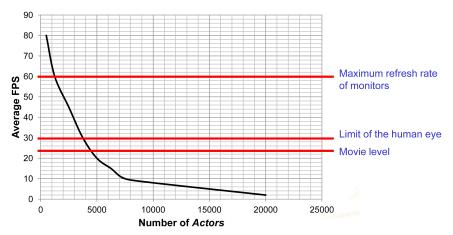
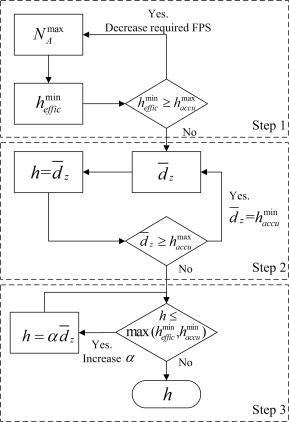
![]() ¨CThe maximum number of the allowable Actors;
¨CThe maximum number of the allowable Actors;
![]() ¨CThe total number of
fragments;
¨CThe total number of
fragments;
![]() ¨CThe minimum number of fragments that are required to be simulated
by one Actor;
¨CThe minimum number of fragments that are required to be simulated
by one Actor;
![]() ¨CThe average distance
between the adjacent fragments;
¨CThe average distance
between the adjacent fragments;
![]() ¨CThe distances between the ith
fragment and the jth fragment;
¨CThe distances between the ith
fragment and the jth fragment;
![]() ¨CThe number of generated fragments at the current time step;
¨CThe number of generated fragments at the current time step;
![]() ¨CThe minimum height
of the Basic Grid to meet the demands of rendering efficiency;
¨CThe minimum height
of the Basic Grid to meet the demands of rendering efficiency;
![]() ¨CThe minimum height
of the Basic Grid to meet the demands of accuracy;
¨CThe minimum height
of the Basic Grid to meet the demands of accuracy;
![]() ¨CThe maximum height
of the Basic Grid to meet the demands of accuracy;
¨CThe maximum height
of the Basic Grid to meet the demands of accuracy;
![]() ¨CA calculation variable used during the iteration of height h;
¨CA calculation variable used during the iteration of height h;
![]() ¨CThe normalized matrix
of relative distance in z-axis;
¨CThe normalized matrix
of relative distance in z-axis;
![]() ¨CThe sum of the ith row in
¨CThe sum of the ith row in ![]() ;
;
![]() ¨CA control variable in the clustering algorithm;
¨CA control variable in the clustering algorithm;
p¨CThe central point of a fragment at the final time step using the clustering algorithm;
p*¨CThe central point of a fragment at the final time step without fragment clustering algorithm;
![]() ¨CThe error tolerance for evaluation of the accuracy of fragment simulations;
¨CThe error tolerance for evaluation of the accuracy of fragment simulations;
N*¨CThe number of fragments for which ![]() .
.
1. Introduction
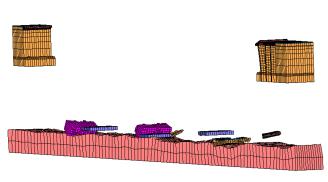
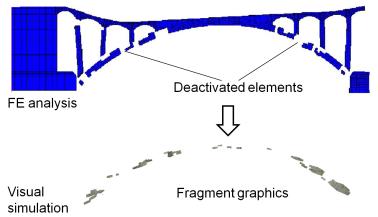
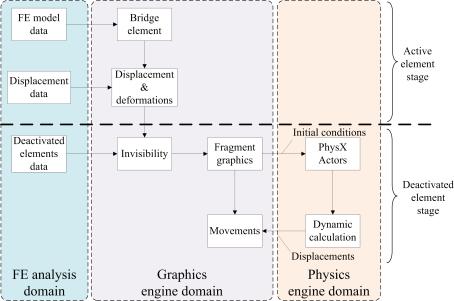
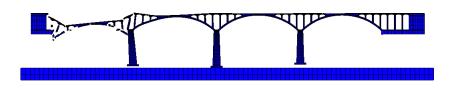
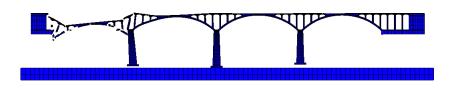
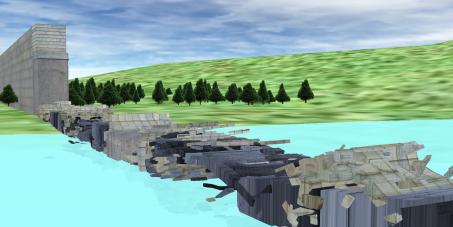
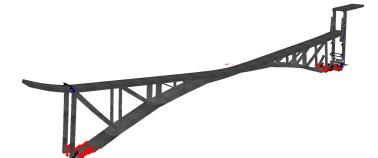
Bridges are very important lifeline infrastructures and bridge collapse events often cause many casualties and severe property losses [1¨C3]. Finite element (FE) analysis can accurately simulate the dynamic process of bridge collapses, and has therefore become one of the most popular numerical simulation methods used for detailed investigations of bridge collapse accidents [3¨C7]. Many FE studies indicate that ˇ°elemental deactivationˇ± is one of the most suitable methods for collapse simulation [8¨C14]. To simulate the complicated nonlinear process of a structural collapse, elements that reach a certain level of damage are ˇ°deactivatedˇ± from the FE model and no longer participate in the subsequent calculation. However, due to the use of ˇ°elemental deactivationˇ± technique, the results obtained directly from an FE analysis of a bridge collapse are usually incomplete and lack debris details. For example, a typical real bridge collapse accident is depicted in Figure 1, with the corresponding FE simulation results shown in Figure 2 [15]. A visual comparison of the two figures shows that large amount of fragments (deactivated elements) are not present in the FE analysis outcomes. Often in the investigation of a bridge collapse, debris comparisons are very important for determining whether the analysis results agree with the real situation, which will in turn contribute to the identification of the main reasons of a bridge collapse. As a consequence, the lack of representation of deactivated elements in the FE results precludes a direct comparison with the real accident.
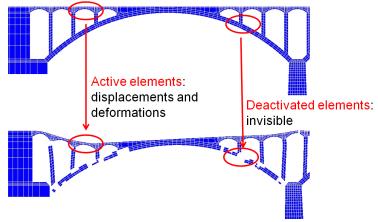
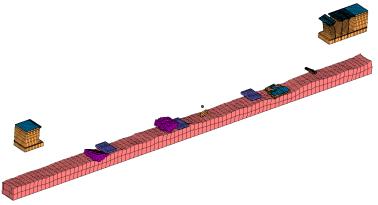
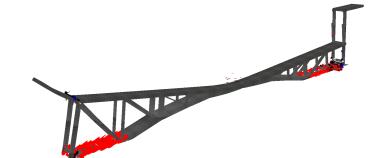
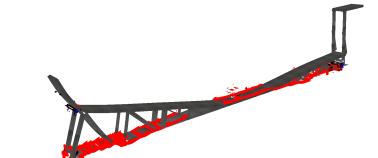
In current literatures, methods for visualizing deactivated elements have not yet been extensively studied. Deactivated elements are made invisible as reported in the published research [8¨C14] and in many general FE codes, such as ANSYS, ABAQUS, and MSC.Marc [16¨C18]. In an FE analysis of a bridge collapse, the active elements (i.e., the elements that are not deactivated) undergoing displacements and deformations are displayed in a graphical form; however once an element is deactivated, it becomes invisible in the post-process of the FE results, as indicated in Figure 3. In particular, when the bridge structural components collapse to the ground, a large number of elements are deactivated and become invisible. This explains why in Figure 2 a large amount of bridge debris is absent. Furthermore, the deactivated elements also make the collapse simulation less realistic and reliable (e.g., some elements disappear abruptly), which creates difficulties for non-professionals to fully understand the collapse situation based on the FE analysis outcomes. As described above, visualization of deactivated elements is a very challenging problem that demands better solutions for conducting detailed and reliable investigations of accidental bridge collapses.
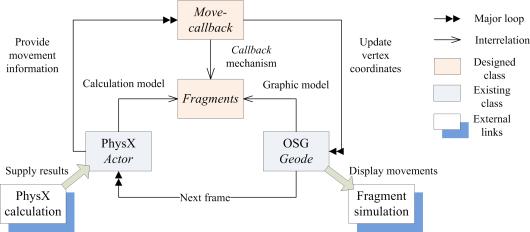
Theoretically, the deactivated elements, representing the failed elements, are severely damaged and become fragments in the process of a bridge collapse. Fragment simulation techniques can therefore be adopted to visualize the deactivated elements. Such techniques can be classified into two categories according to their different rendering time: off-line simulation and real-time simulation [19]. The off-line simulation, often used for special movie effects, can produce high-fidelity fragment effects at the expense of long rendering time and costly computer hardware. On the other hand, the real-time simulation is highly efficient in producing fragment animations with good reality and powerful interactive functions. For this reason, the real-time simulation is widely used in 3D game productions. For a bridge collapse accident, repeated simulation is often necessary to help identify the most likely reasons of a collapse. This requires a high rendering efficiency which cannot be satisfied by the time-consuming off-line simulation; therefore the real-time simulation is a suitable alternative. In addition, the real-time simulation can also offer interactive operations for more convenient observations of a bridge collapse.
The process of fragment simulation constitutes of two stages: fragment generation and fragment movement. A number of simulation methods, such as physically based and geometrically based methods [20¨C24], have been proposed for fragment generation. Note that in the collapse simulation presented in this study, a considerably fine element mesh is made which can represent the size of the fragments. Note also that the generation of deactivated elements is based on an FE analysis and additional calculation is not required. Therefore, the fragments can be transformed directly from the deactivated elements. Specifically, once an element is deactivated in the FE analysis, a new graphical object of fragment is subsequently generated with the same shape and location as the corresponding deactivated element (Figure 4). This makes the fragment generation process very simple in concept and efficient in application.